Projects
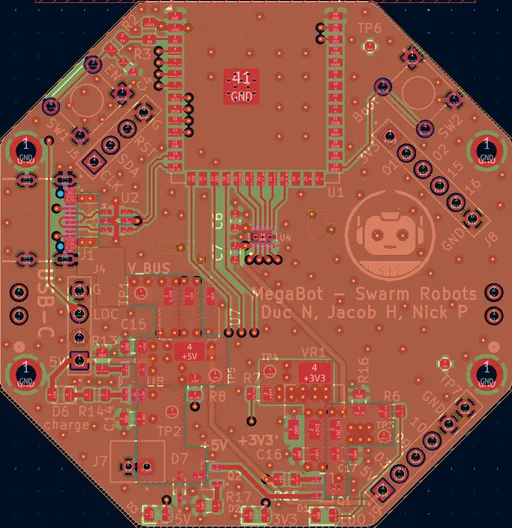
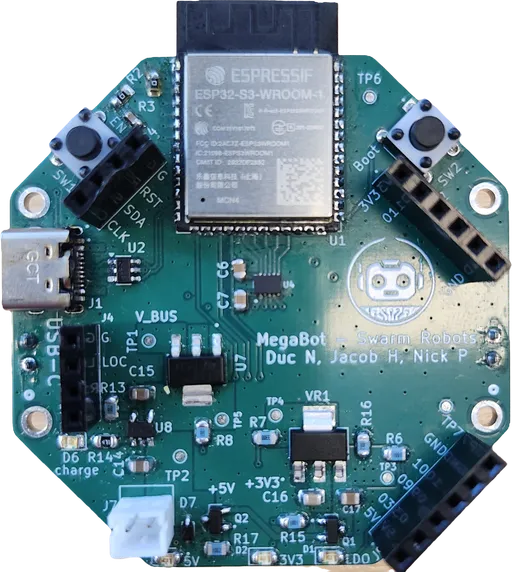
Swarm Robot Motherboard
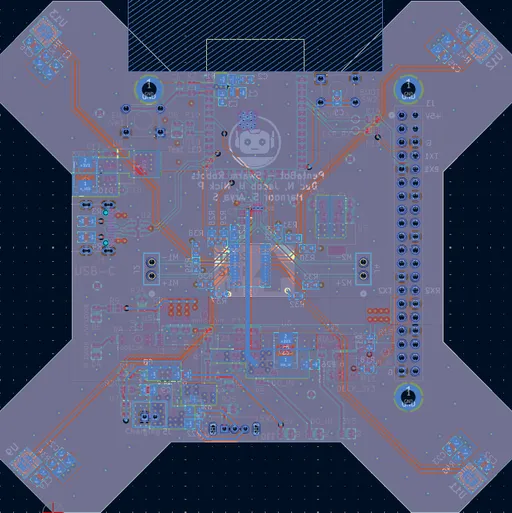
This is a swarm robot motherboard that interacts with an Raspberry Pi 4 to control the robot. Main components include:
- An ESP32 MCU. This sends control an on-board motor driver and proximity & color sensors.
- A smart battery charging circuit via a USB-C connector, with an LED indicating the charging status.
- A combination of P-channel MOSFETs to prevent current draw from the battery during charging.
- A motor driver, controlled by the ESP32's PWM signals, provides power (1.5A max each) to two motors that drive the robot.
- Four proximity & color sensors pointing downwards to detect objects. They send data to the ESP32 via I2C and have their addressed configured by a I2C switch.
- A boost converter to step up battery voltage to 5V to power the Raspberry Pi 4.
- LDO regulators (5V-3.3V, 3.7V-3.3V, 3.3V-1.8V), with Schottky Diode reverse current protection, to provide stable and low-noise voltage rails.
- A USB-C, with ESD protection, allows the ESP32 to use the firmware written on a USB-connected laptop.
- A bidirectional logic level shifter 5V - 3.3V for communication between the Raspberry Pi 4 and an external localization lighthouse deck.
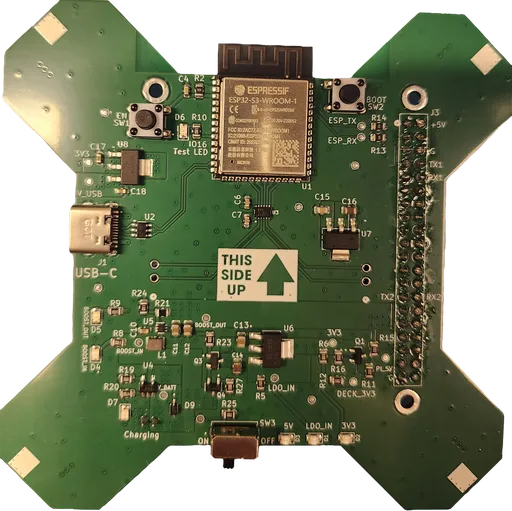
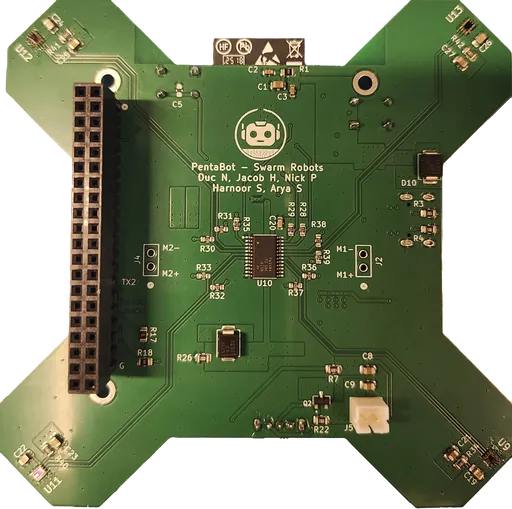
Swarm Robot Main Control Board
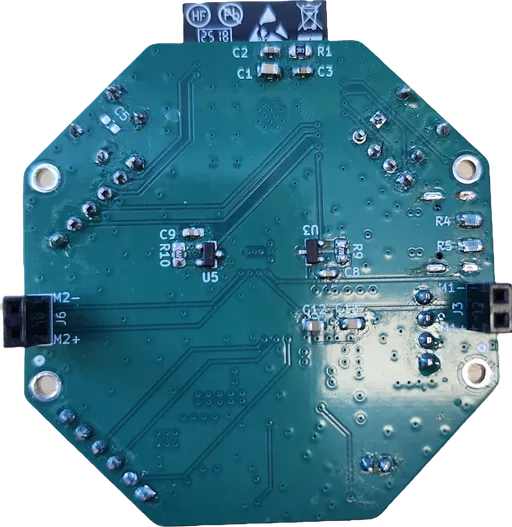
This is a swarm robot MCU board that interacts with sensors and localization circuits on another board via I2C. Main components include:
- An ESP32 MCU. This sends control an on-board motor driver and external proximity & color sensors.
- A smart battery charging circuit via a USB-C connector, with an LED indicating the charging status.
- A combination of P-channel MOSFETs to prevent current draw from the battery during charging.
- A motor driver, controlled by the ESP32's PWM signals, provides power (1.5A max each) to two motors that drive the robot.
- Two hall effect sensors (wheel encoders) to provide control feedback to the ESP32.
- A USB-C, with ESD protection, allows the ESP32 to use the firmware written on a USB-connected laptop.
- Two connectors to interact with an exteral sensor board and two GPIO connectors for testing purposes.
ASV Thruster Power Board
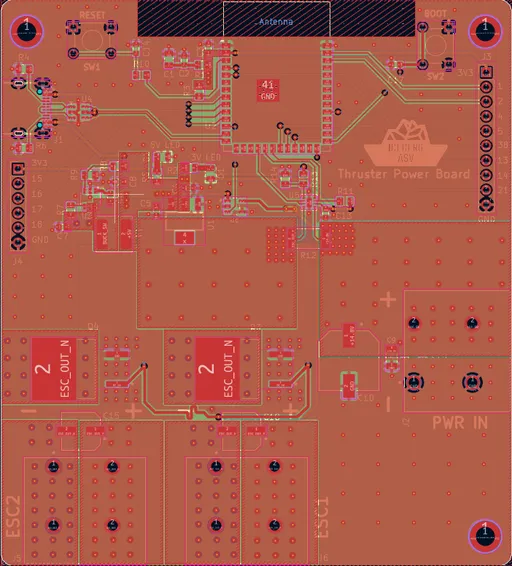
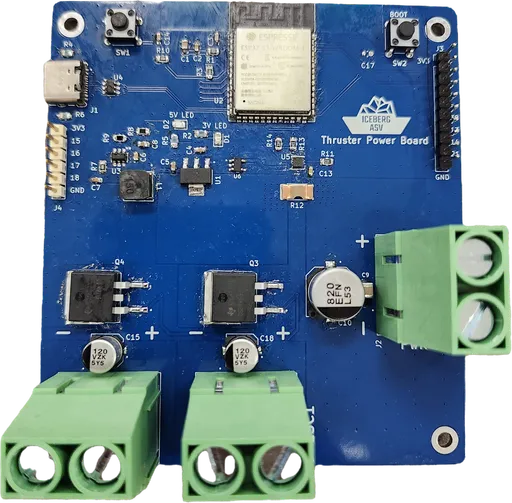
This is Iceberg ASV’s thruster power board with 14.8V intake from a battery. Main components include:
- An ESP32 MCU. This sends control signals open/close N-channel MOSFETs. Spare connector headers are used to test software.
- A USB-C, with ESD protection, allows the ESP32 to use the firmware written on a USB-connected laptop.
- A 14.8V to 5V buck converter and 5 to 3V3 LDO.
- A High-Speed, Current Sense Amplifier With Integrated Comparator, connected to a sense resistor, features overcurrent protection.
- Four N-channel MOSFETs in parallel to safely turn on/off two electronic speed controllers (ESCs) that draw up to 50A in total.
- Two ESC output connectors with flyback diodes to protect inductive loads from high voltage spikes.
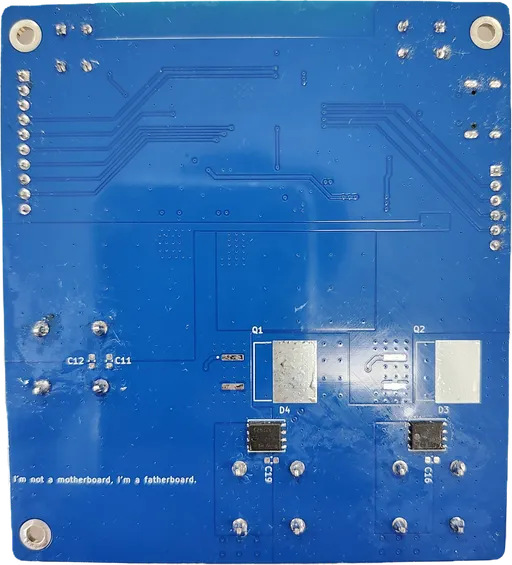
ASV LED Tower Driver Board
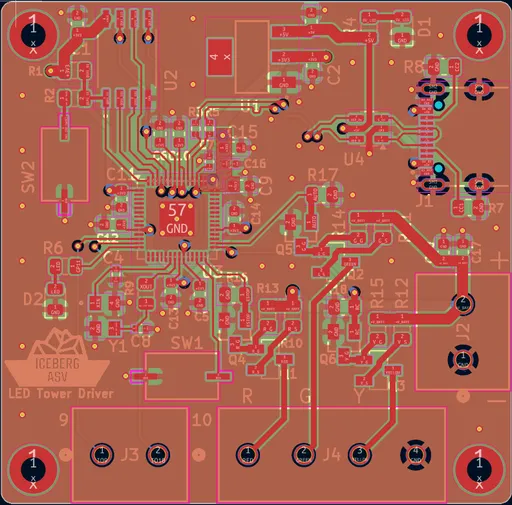
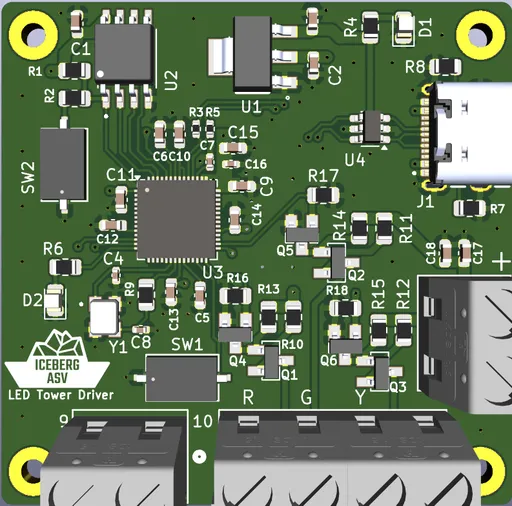
This is Iceberg ASV’s LED driver board with 14.8V intake from a batttery. Main components include:
- An RP2040 coupled with a flash memory and a crystal oscilator. This sends control signals to indicate the vehicle operating mode.
- A USB-C, with ESD protection, allows the RP2040 to use the firmware written on a USB-connected laptop.
- A 5 to 3V3 LDO to provide power to the RP2040 from the USB-C.
- A combination of N-channel and P-channel MOSFETs driven by the RP2040 to correctly indicate the vehicle operating mode.
Autonomous Kart Control Board
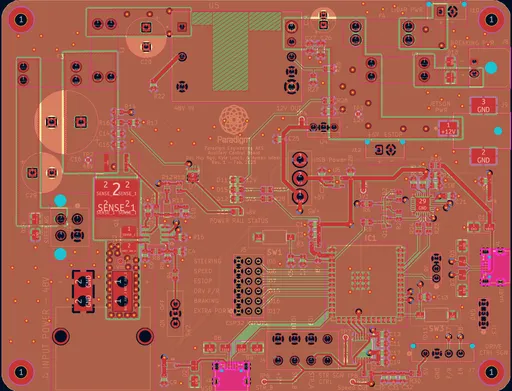
This is Paradigm Engineering’s final control board with 48V intake. Main components include:
- An ESP32 MCU. This sends all necessary PWM and output signals to the motors based on signals received by the connected Pixhawk.
- A USB to UART bridge, allowing the ESP to use the firmware written on a USB-connected laptop via UART.
- A logic level shifter, shifting the 3V3 ESP outputs to 5V for motor inputs that require 5V.
- Two USB connectors, one for the UART bridge and one directly connected to the ESP.
- A 48 to 12V buck converter, a 12 to 5V linear regulator, and 5 to 3V3 LDO.
- A hot-swap IC to safely connect and remove the battery connection. The IC is connected to a sense resistor for overcurrent protection, a voltage divider for under-voltage protection, and a switch to toggle the system.
- Outputs to power two motors, complete with a fuse for current protection, and a flyback diode to protect inductive loads from high voltage spikes, and a barrel jack connector for a Nvidia Jetson.
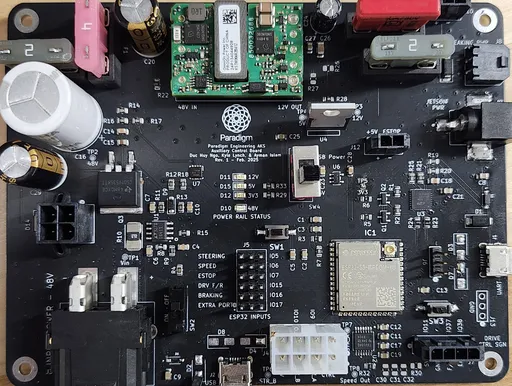
Autonomous Kart Auxiliary Board
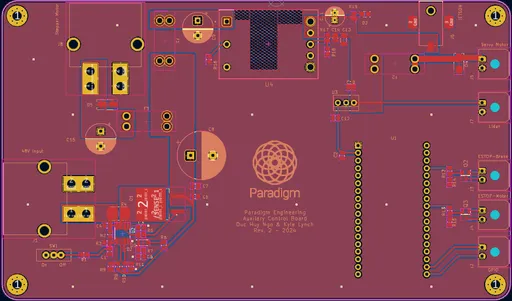
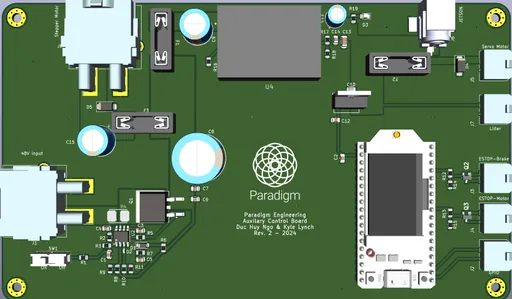
This is an auxiliary board with 48V intake. Main components include:
- A hot-swap IC to safely connect and remove the battery connection.
- Outputs to power to a Jetson computer, lidar, braking and steering motors.
- LoRa receiver module to stop the car if remotely triggered.
- A 48 to 12V buck converter and a 12 to 5V linear regulator.
STM32WB DevKit
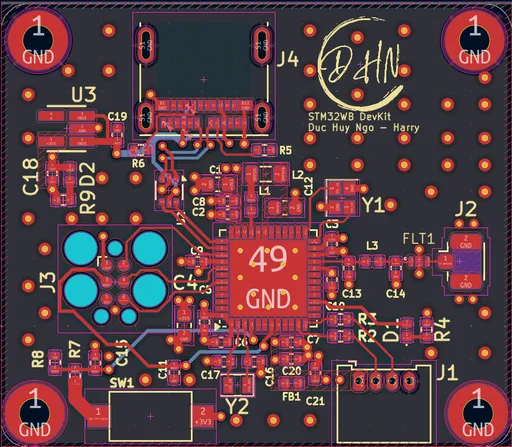
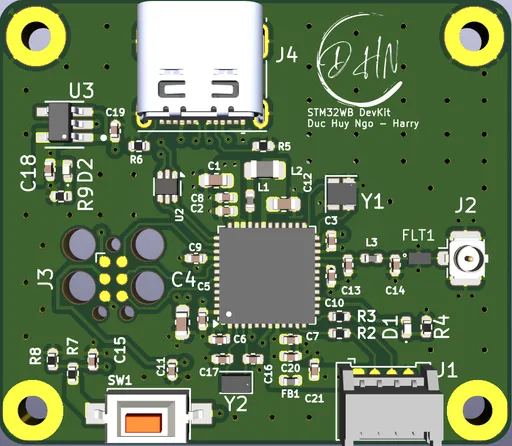
This is a STM32 DevKit with Bluetooth capability. Main components include:
- An STM32WB MCU.
- Connectors for debugging purposes: USB, UART, JTAG.
- RF circuit with connector for an external antenna.
- Two external crystals (Low and high-speed) for clock.
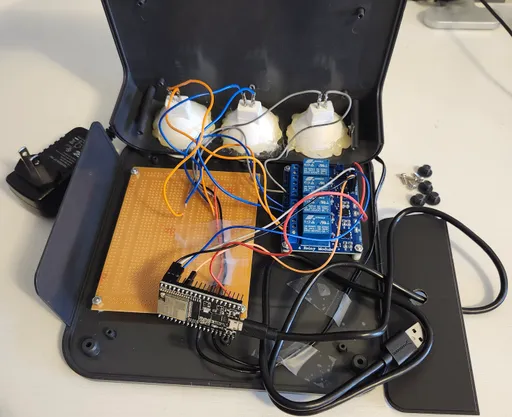
Voice-based Lighting System
Product flyer - pdf
Product flyer - pdf
I designed a system that processes human verbal commands and controls the lighting circuits with an ESP32 DevKit This product is an ESP32, Sinric Pro and Google Assistant module that allows users to activate three lights control system.
- ESP32 is programmed to output signals and to control the relays. The lights turn on/off when the relays close/open the lighting circuits individually or at once.
- Real-time monitor and dashboard for the lighting system on both computer and mobile phone. Displays are available on SinricPro and Google Home.